Control de velocidad
para motores DC por modulaciónde ancho de pulso
Fuente www.todorobot.com.ar
Frecuentemente, se intenta controlar un motor DC mediante una resistencia variable
conectada a un
transistor. Si bien este sistema funciona, genera gran cantidad de calor y perdidas
de potencia.
Con este simple circuito se elimina ese problema controlando la velocidad de
un motor DC mediante la
modulación por ancho de pulso.
Cuando más ancho es el pulso, mayor es la velocidad del motor y viceversa.
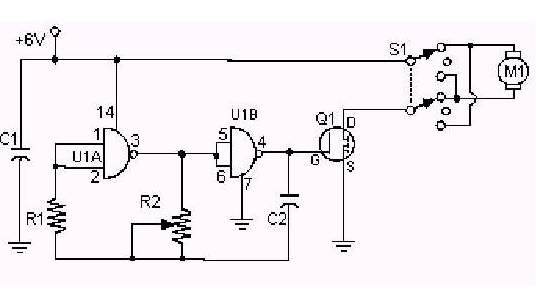
Esquema
Materiales
R1 1 1 Meg 1/4W Resistor
R2 1 100K preset lineal
C1 1 0.1uF 25V Capacitor cerámico
C2 1 0.01uF 25V Ceramic Disc Capacitor
Q1 1 IRF511 MOSFET IRF620
U1 1 4011 CMOS NAND Gate
S1 1 DPDT Switch
M1 1 Motor (ver Notas)
Notas
1. R2 Ajusta la frecuencia del oscilador y por lo tanto la velocidad del motor
M1.
2. M1 puede ser cualquier motor DC que opere a partir de los 6v y no consuma
mas allá de la corriente
soportada por Q1. El voltaje puede ser incrementado conectando un vol